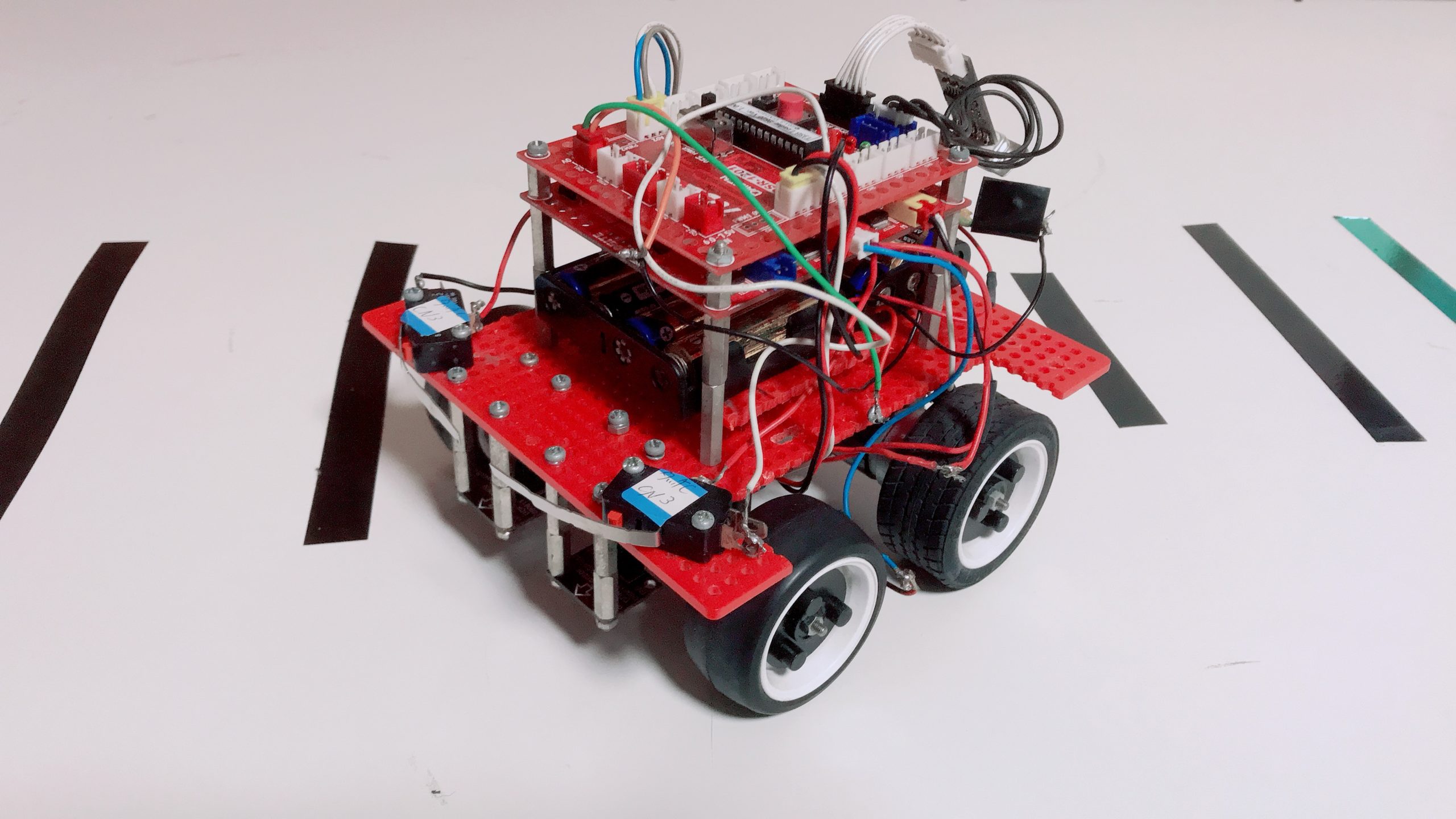
ロボット工作をするときに使うことが多いラインセンサの仕組みを理解してみよう

IT社会になり様々なロボットが活躍する今日、用途に合わせてたくさんのセンサが使われています。
その中でも小学生でも簡単に理解できるラインセンサの仕組みを勉強してみましょう。
前回このラインセンサを使ってライントレースを行う方法についてご紹介しましたので、ラインセンサの使い道がピンと来ない方はこちらを先にご覧になってください!
ラインセンサに使われる部品
フォトリフレクタ

フォトリフレクタは赤外線を発射する送信部と、それの反射光を受け取る受信部で構成されています。
受信部にはフォトトランジスタというトランジスタが主に使われます。これは受け取る赤外線の量によって流す電流の量を変える特殊な部品です。
どちらもLEDと同じで2本の足がそれぞれについています。赤外線LEDはアノード(+)とカソード(-)、フォトトランジスタはエミッタ(+)とコレクタ(-)と呼ばれる足がついています。
抵抗器

受信側のフォトトランジスタに直列で繋げるために用います。ここの抵抗は47KΩなど大きい値の抵抗器を用いることをお勧めします。
半固定抵抗器(可変抵抗)

自分の好みに合わせて抵抗値を後から変えることができる可変抵抗器は、送信側の赤外線LEDに直列で繋げます。大体200Ω前後の小さめの抵抗値にしないと、赤外線が出ませんので注意が必要です。
可変抵抗器を使う理由として、赤外線の量を調節することで受信の数値を変更することがあげられます。もちろん可変抵抗を使わないこともできます。
マイコン(例えばArduino)

マイコンとはマイクロコンピュータの略です。パソコンほど複雑なことはできませんが、センサの値を読み取って、プログラムに則して処理しモータなど他の部品に出力をして動かすことに特化した電子部品です。
今回はラインセンサの値を読み取るために用います。これを使ってラインセンサの数値がどれくらいかを測定し、プログラムを組むことまで可能です。
回路図

解説
上の図はA(アノード)、K(カソード)、E(エミッタ)、C(コレクタ)です。GNDはグランドと言って電位の基準、すなわち0Vの場所であることを示しています。5Vは加える電圧が5Vであることを表しています。
基本的にフォトリフレクタはLEDと同じ使い方をするので、電源と繋ぐ間に抵抗器を挟むだけというシンプルな形をしています。
オレンジ色の抵抗器は可変抵抗器です。赤外線LEDは送信する量を調整できるようにしています。
反対に、フォトトランジスタは普通の抵抗器を取り付けます。ここの抵抗器は大きい方がいいのでした。そしてもう一つ大事なのが、どれくらいの反射率だったかを調べるために抵抗器を繋ぐ手前で線を分岐させます。イラストだと水色の線になっています。この線に流れた電流の量をマイコンなどで計測するため絶対に必要になってきます。
使い方
実際はArduinoなどのマイコンに接続して使います。単体では何も使えないのできをつけてください。
先ほど説明したように、フォトリフレクタを使用するためには3つのコード(線)が必要になります。5Vの電源部分とGNDという電位を強制的に0Vにする部分、出力部分の3つになります。
Arduinoにもこの3つのコードを接続できるようになっています。5V、GNDは先ほどのイラストと同じ名前で、出力部分がInputという名前になっているのでそこに接続してください。
一番重要になるのはもちろん出力部分です。Arduinoでシリアルモニターを開いてこの出力の大きさを調べることができます。私がやったとき出力の大きさは、黒の時が100前後、白の時には900前後になりました。振れ幅が100〜900と大きいので、うまく数値を使えば緑色の時など白や黒以外の色も検知できそうです。
気づいた方もいるかもしれませんが、可変抵抗の値をいじれば値が変わるので振れ幅ももちろん変わってきます。自分の好みの大きさに変えて色々試してみてください!
最後に
さてラインセンサーの仕組みは理解できましたでしょうか。センサーというと中身を理解せずに使いがちですがしっかり理解できれば大したことないと思います。実際に私も小学生の時、ラインセンサーの中身を理解せずに使っていました。大学に入ってからしっかり勉強してみたら意外と簡単な仕組みだったので、小学生の時しっかり理解できればもっといいロボット作れたなぁと悔しい思いがあります。
みなさんもロボットに興味があったらArduinoという一番使われているマイコンキッドを買って色々遊んでみてください!






![[2024年最新版]ウユニ塩湖の行き方と楽しみ方](https://www.hoicosschool.com/wp-content/uploads/2024/03/4557CD0D-C438-4F77-B907-BC8728711DBE-150x150.jpeg "[2024年最新版]ウユニ塩湖の行き方と楽しみ方")



Leave a Comment